
Time and Sync
Time and Sync
Section titled “Time and Sync”Robots do not run on one global timestep. Cameras, state estimators, planners, policies, controllers, and operators all update on different schedules.
Retriever makes this explicit with two graph-level choices:
- Clock: when a Flow wakes up.
- Sync policy: how each incoming event buffer is sampled before
step(...)runs.
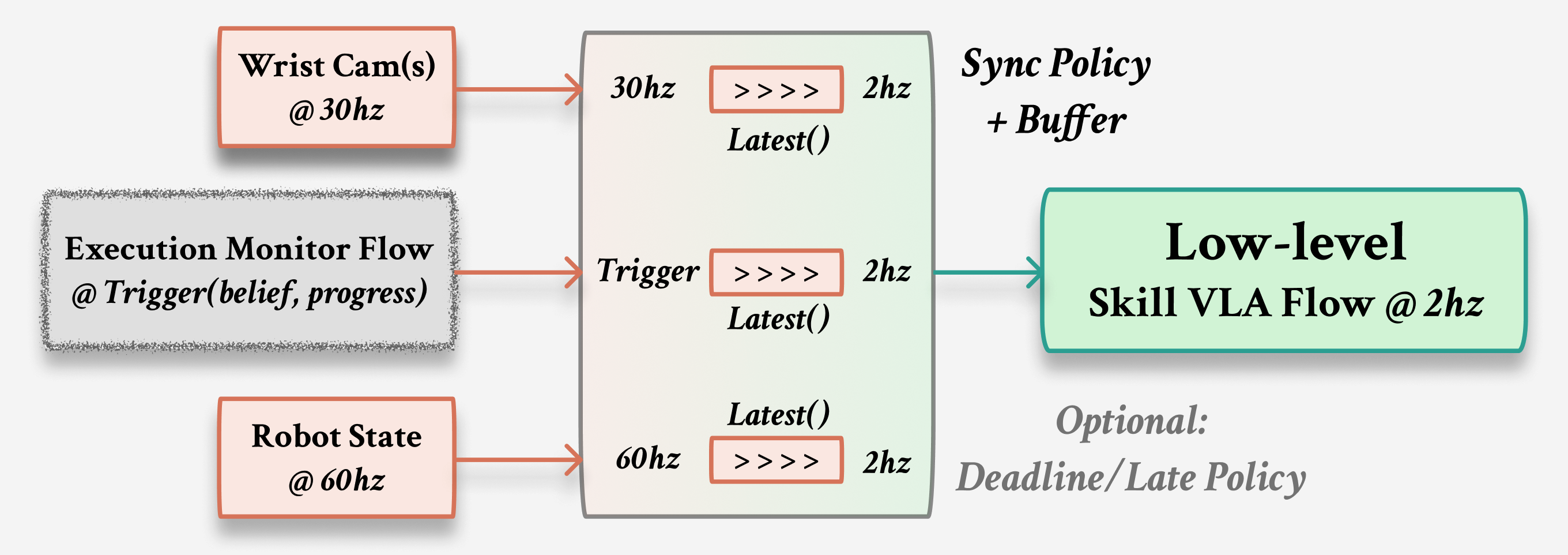
The intuition
Section titled “The intuition”The important part is not the exact adapter name. The important part is that sampling is part of the graph instead of being hidden in callback timing.